功能要求及总体思路
1.功能要求
在开始设计并制作机器人之前,我们首先需要明确所设计机器人应具备的主要功能,即设计需求。
(1)机器人能够实现快速灵活移动;
(2)能够顺利登上高度为135毫米台阶;
(3)具有抓取机构,能够顺利抓取图1所示圆柱形目标物体,目标物体放置于图2所示支架上,放置位置高度325毫米;
(4)具有抛射或者弹射机构,能够将物体弹射或者抛射等方式将物体送至图3所示平台,平台高度750毫米;
(5)机器人所有可动机构展开后最大尺寸不大于650*650*750mm。
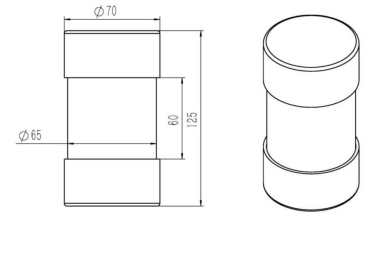
图1 抓取目标物体
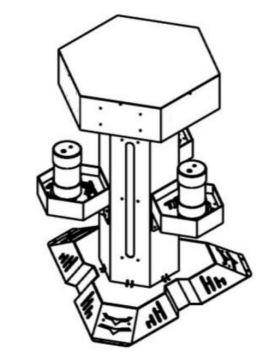
图2 物体繁殖支架
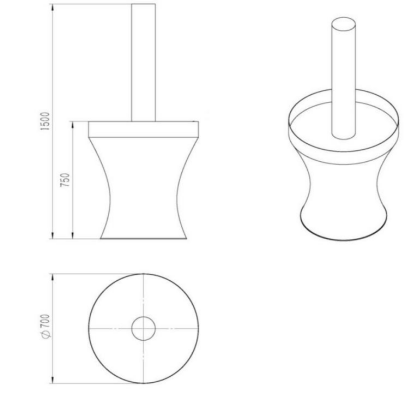
图3 投射平台
2. 总体设计思路
根据设计需求进行分析得出几点设计思路
(1)为兼顾移动速度以及稳定性,拟设计移动底盘为轮式,采用四轮减速电机驱动;
(2)车轮的最大直径为125毫米,为成功爬上高度为135毫米台阶,采取在机器人后端布置类似于千斤顶的辅助装置;
(3)用舵机夹手实现取物动作;
(4)采用类似于投石器的抛射方式抛射物体至平台,利用气缸驱动抛射器。
对于物体的抓取采用舵机控制小车前端上部夹子的抓取和伸放,保证了夹子的力度和准确性,灵敏度相对于采用机械带动夹子的升和放更为灵敏和易于控制。夹持夹子经特殊设计,采用前端弧度较小后面弧度逐渐增大的方式,当夹子完全闭合时前端较平缓区域完全贴合,而后面弧度较大部分夹子闭合组成一个封闭圆,当夹取物体时由于夹子前端的幅度可以使被夹取物体受到向弧度增大的方向的力,从而使夹取物体向弧度增大方向移动,保证了夹取的稳定。
经过各个关键工作机构的设计构思,结合控制系统实现机器人独立爬上台阶,并利用抓取结构抓取物体并将物体放置至抛射台,快速移动至投射平台位置,利用自身抛射结构将物体投掷至主平台。
3. 主要技术点
表1 机器人设计技术点
常态尺寸 |
640mm×520mm×630mm |
重量 |
9kg |
行走轮直径 |
125mm |
最大行驶速度 |
5.6 m/s |
最大延伸尺寸 |
740mm×520mm×630mm |
抛射方式 |
气动 |
最大抛射高度 |
900mm |
垂直气缸工作行程 |
150cm |
夹钳器工作行程 |
180° |

